

Esplorazioni subacquee a distanza e in sicurezza: ci pensa OceanOneK
09 Agosto 2022 06:00

Il film del 1997 “Titanic” ha fatto scoprire al grande pubblico qualcosa a cui molti, fino a quel momento, non avevano pensato.
Non parliamo della grande storia d’amore tra Jack e Rose, e nemmeno della straordinaria voce di Celine Dion, e nemmeno della teoria per cui anche Jack si sarebbe potuto salvare, salendo sulla porta di legno.
Si tratta invece dell’esplorazione dei grandi relitti marini che costellano i fondali di mari e oceani di tutto il pianeta.
Si parla della possibilità, per un essere umano, di immergersi e compiere diverse attività in acqua (oltre alla normale apnea) già con Leonardo Da Vinci: pare che il genio toscano avesse già progettato una simil-tuta da palombaro, ma non rese mai noti i suoi studi in merito, per il timore che le sue scoperte fossero utilizzate in ambito bellico.
Nei secoli, e ancora di più dal 1800 in avanti, questa ricerca ha acquisito esperienza e tecnologia, arrivando oggi a metodi e strumenti impensabili fino a pochi anni fa.
Torniamo al Titanic: James Cameron, regista del film e grande appassionato di ricerca subacquea, immortala nel film campione d’incassi la discesa e l’esplorazione del relitto di un piccolo sottomarino MIR. Il piccolo apparecchio poteva contenere poche persone, ma era già un passo avanti notevolissimo in questo tipo di esperienze.
Ma si parla di quasi 30 anni fa: in questo periodo il settore ha fatto davvero “passi da gigante”, fino ad arrivare alla sua ultima “invenzione”: OceanOneK.
Si tratta di un robot umanoide in grado di esplorare, telecomandato, i fondali marini, a “caccia” di relitti.
Creatura dei ricercatori dell’Università statunitense di Stanford, ha colori brillanti, un “viso” e due braccia che gli permettono di interagire con l’ambiente che lo circonda, mentre il resto del corpo ha forme compatte e soprattutto 8 propulsori multidirezionali che possono così permettergli di compiere manovre complesse in un habitat così difficile.
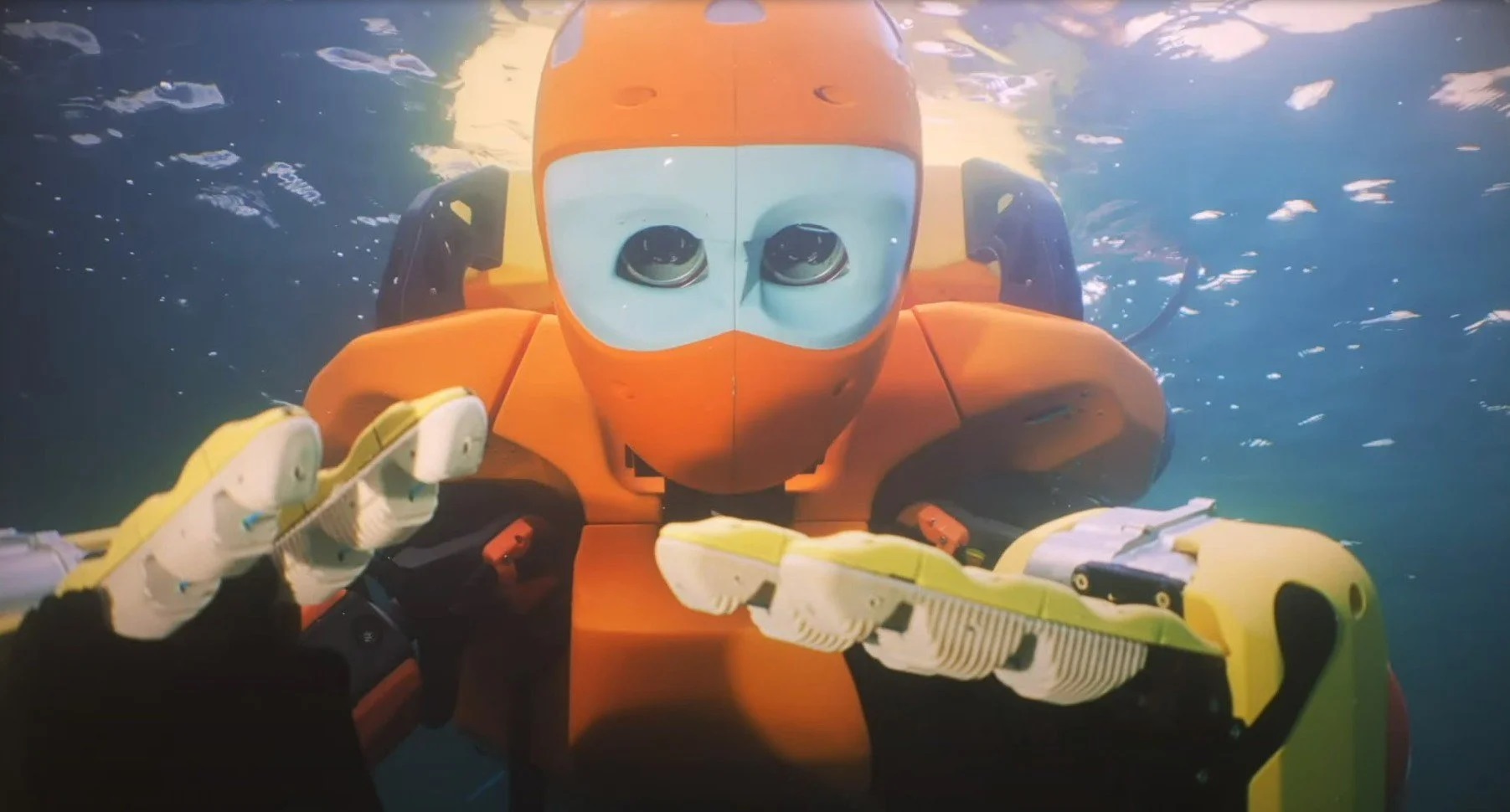
Ma la sua più grande rivoluzione risiede nelle “sensazioni” che riesce a dare al suo manovratore: i suoi sofisticati sensori infatti permettono, anche a distanza, di “sentire” realmente ciò che si prova a toccare con mano questi relitti, proprio come si stessero esplorando in prima persona.
L’allenamento per le spedizioni è iniziato con innumerevoli ore di progettazione, sperimentazione e assemblaggio, seguite da dozzine di immersioni nella piscina dell’Università di Stanford per imparare ad affrontare l’imprevedibilità del mondo reale. Per permettere al robot di raggiungere i 1.000 metri di profondità, i ricercatori hanno adattato il suo corpo con una speciale schiuma composta da microsfere di vetro, che forniscono galleggiabilità, pur essendo in grado di resistere all’immensa pressione. Inoltre, le braccia del robot sono state riempite con un meccanismo formato da olio e molle: queste comprimono il primo per adeguarlo alla pressione esterna prevenendo il danneggiamento delle componenti elettroniche.
Poi, la messa in acqua vera e propria. OceanOneK ha già vissuto diverse avventure subacquee, anche nelle acque del Mediterraneo, visitando ad esempio il piroscafo Francesco Crispi, affondato nel 1943 non lontano dall’Isola d’Elba mentre trasportava quasi mille soldati italiani, e un’antica nave romana del II secolo affondata vicino alla Corsica, dalla quale ha recuperato diversi preziosi reperti.
Due le finalità di questo progetto: per prima, la possibilità di raggiungere luoghi impenetrabili o difficilmente raggiungibili da grossi apparecchi evitando rischi per gli esseri umani; la seconda, trasmettere ai manovratori le stesse sensazioni di un’esplorazione “di persona”.
Conferma la buona riuscita dei primi esperimenti Oussama Khatib, tra i costruttori di OceanOneK: «Non avevo mai provato niente del genere in vita mia. Posso dire che sono stato io a toccare il Crispi a 500 metri di profondità, l’ho sentito».
greenfuture@liberta.it
© Copyright 2025 Editoriale Libertà
NOTIZIE CORRELATE






